
teniendo ya todo claro del como nuestro robot va a funcionar nos que da ultimmitar detalles como por ejemplo el agarre de las orugas para que nos permitan extencion y flexivilidad en el momento de cojer las pelotas puesto que estas pelotas estan formadas de diferente dimenciones y tamaños bsiendo esta la necesidad del lograr agarrarlas se implemento el sistema flexible de las orugas
Y por otro lado el lograr estavilizar la parte en la cual estan ubicados los piñones que nos ejercen la fuerza para el rodamiento que nos mueve el brazo
viernes, 26 de marzo de 2010
miércoles, 24 de marzo de 2010
Desicion final
Por problemas con la ubicasion facilidad llegamos a la conclusión del que el sistema de caenilla no era nada conveniente y por esto nos llamo la atencion el uso de un sistema de orugas de tal modo que las orugas atraigan asia ellas la pelota y esta el enviarla directamente ala palita
martes, 23 de marzo de 2010
Una primera idea

Ya desidido que se ira a usar este sistema para el agarre de las pelotas no encontramos con un pequeño problema y es el que con este sistema no alcansaremos a obtener agarre de las pelotas desde el suelo por esto entraremos a diseñar un sistema que nos ayude a la recoleccion de las pelotas y que de tal manera sean enviadas al brazo en manera de garlancha y este asu vez pueda recogerlas y poderlas enviar al otro campo por encima de la red para que asi pueda aser su anotacion en el campo contrario
Se inicio primero con un sistema de caenilla pensandoo en el esta este un poco elevada del suelo no mucho en lo posible lo mas pegadita sin tampoco ejercer friccion con el pisoesta caenilla devia ser ubicada de manera paralela al suelo y al brazo de forma que la recoja y la translade al brazo que estara un coco mas alto
viernes, 19 de marzo de 2010
Correccion

Estando seguros del que seria excelente y muy apropiado el uso del brazo catapulta nos dimos cuenta que este en la parte frontar nos impedida uan buena movilidad y el desplazamiento conjunto del brazo e inercia de este mismo para poder arrojar la peleta al otro lado del campo por encima de la red diseñada por vex
Dando asi la utilizacion del brazo en la parte posterior para de tal manera poder ser levantado y alcansar una elevacion mas favorable
- Implementamos asi el uso de engranages para poder tener mayor fuerza en el agarre y elevacion y movilidad efectiva del brazo en el sentido contrario del robot


jueves, 18 de marzo de 2010
Nuestra primera luz

Entramos a nuestra primera etapa del diseño de nuestro robot ya el haber superado los incovenientes con carro "tipo" logrando entender y el conocer del como poder hacer los diseños adecuados de la estructura es necesaria para no tener incovenientes en el despalzamiento propio y adecuado del robot
Comensamos a devatir y a plantear los distintos posibles diseños dando cavidad a uno en especial puesto que nos ha llamado la atencion por la gran cantidad de fortalezas que se nos ofrece por la al tura que puede llagar a alcansar ddespues de ser encendido, por la posible facilidad que puede presentar para la recoleccion de las pelotas y eñl desplazamiento de dichas al campo de la competencia teniemdo la funcion combinada de garra catapulta
tura que puede llagar a alcansar ddespues de ser encendido, por la posible facilidad que puede presentar para la recoleccion de las pelotas y eñl desplazamiento de dichas al campo de la competencia teniemdo la funcion combinada de garra catapulta
 tura que puede llagar a alcansar ddespues de ser encendido, por la posible facilidad que puede presentar para la recoleccion de las pelotas y eñl desplazamiento de dichas al campo de la competencia teniemdo la funcion combinada de garra catapulta
tura que puede llagar a alcansar ddespues de ser encendido, por la posible facilidad que puede presentar para la recoleccion de las pelotas y eñl desplazamiento de dichas al campo de la competencia teniemdo la funcion combinada de garra catapulta
miércoles, 17 de marzo de 2010
De nuevo
 Después del haver logrado superar nuestro problema con todo esto del transmisor en el día de ayer nos pudimos dar cuenta que nuestro diseño piloto tenia muchas deficiensias que imposivilitavan e interferían desde su movilidad asta su posicionamiento
Después del haver logrado superar nuestro problema con todo esto del transmisor en el día de ayer nos pudimos dar cuenta que nuestro diseño piloto tenia muchas deficiensias que imposivilitavan e interferían desde su movilidad asta su posicionamiento Entendiendo así que era dispensable mente la re estructuracion de nuestro carrito desde el chasis asta el pocisionamiento de los ejes de los rodamientos de los motores de dezplasamiento ya que en nuestro anterior diseño se producía una fricción contante con el chasis
 La restructuraccion se dio de la siguiente forma por motivos de normatividad del concurso VEX su tubo la necesidad de diseñar el chasis mas pequeño que lo inicial puesto que se sobrepasaban las 18 pulgadas de norma siendo esta nuestra primera fase de modificacion
La restructuraccion se dio de la siguiente forma por motivos de normatividad del concurso VEX su tubo la necesidad de diseñar el chasis mas pequeño que lo inicial puesto que se sobrepasaban las 18 pulgadas de norma siendo esta nuestra primera fase de modificacionSe reestructuro el chasiss para que en la parte de rotacion del eje del motor no ubiesen probavilidades de friccion con este concluyendo que fue necesario utilizar dos barreras una de estas utilizada para el apoyo del motor y la otr para el apoyo de las guias del eje del motor para asi no producir dicha friccion por movimientos vibraciones ni mucho menos falta de enclavamiento de estos con el chasis
martes, 16 de marzo de 2010
De induccion para nuestro carro "robot tipo"
 Lograda la creación de nuestro proyecto piloto necesario para resivir de manera cómoda la inducción de vex sobre la programacion del microcontrolador, Encontramos nuestro primer reto del equipo ya que por problemas de programador no logramos la instalación propia y adecuada de este necesario para la inducción teoricopractica del como programar el microcontrolador; Por lo cual se nos fue necesario el resivir la inducción si elementos de trabajo
Lograda la creación de nuestro proyecto piloto necesario para resivir de manera cómoda la inducción de vex sobre la programacion del microcontrolador, Encontramos nuestro primer reto del equipo ya que por problemas de programador no logramos la instalación propia y adecuada de este necesario para la inducción teoricopractica del como programar el microcontrolador; Por lo cual se nos fue necesario el resivir la inducción si elementos de trabajoY dejando a un lado lo practico y las de vidas pruevas en nuestros elementos dados así encontrando nuestra primera dificultad en el proceso de nuestro proyecto robotic vex
Pero bueno asiendo caso omiso a nuestras limitaciones en la inducción se nos fue enseñado en manera detallada los siguientes parámetros básicos de programacion para nuestro microcontrolador
- Manera de trabajar el software de programacion en lenguaje "C"
- El como lograr que el carrito en modalidad automática autónoma pera actuar según nuestro criterio en el desplazamiento Asia las distintas coordenadas logrado esto por una buena coordinación de los motores en tiempo y velocidad de giro de estos, todas estas instrucciones de trabajo siendo programadas y quemadas por software a nuestro controlador
lunes, 15 de marzo de 2010
Proyecto piloto Carro "robot tipo"

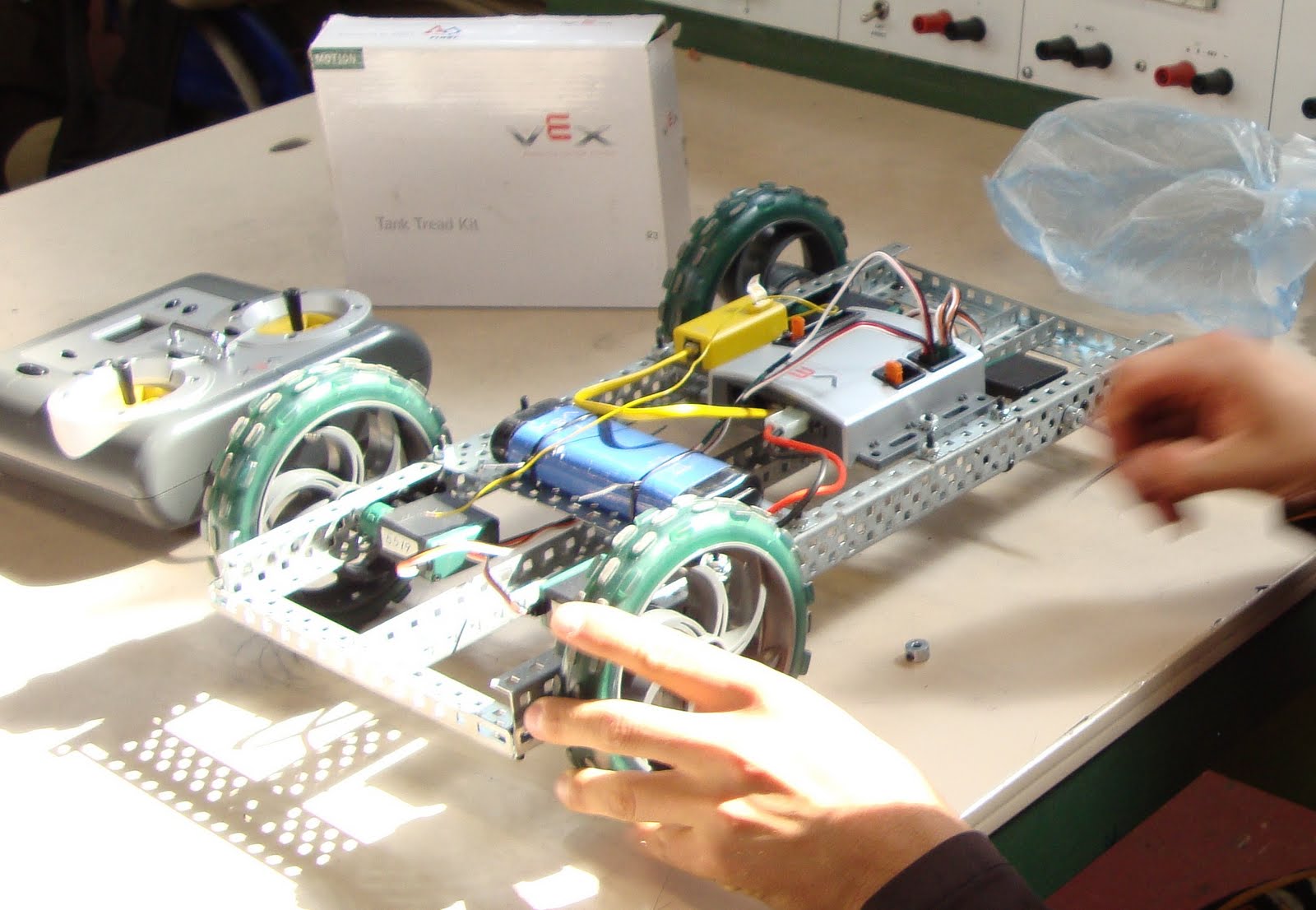
Hoy 15 de marzo se logro crear el proyecto piloto un vehículo descrito de la siguiente manera
Siendo este un modelo sencillo enfatizado solo para lograr el desplazamiento asía las cuatro coordenadas básicas derecha, izquierda, adelante y atrás por esto se dio uso a cuatro llantas labradas para todo terreno el receptor del transmisor para poder controlar exitosamente el controlador vex y este a su vez los motores; La finalidad de su creación como proyecto piloto fue la practica reconocimiento y manejo de los elementos dotados al grupo y para ya así recibir satisfactoria y cómodamente la inducción, el día 16 de marzo correspondiente al proceso de programacion del controlador vex y el transmisor para lograr así el buen desarrollo creativo de nuestro proyecto definitivo
Siendo este un modelo sencillo enfatizado solo para lograr el desplazamiento asía las cuatro coordenadas básicas derecha, izquierda, adelante y atrás por esto se dio uso a cuatro llantas labradas para todo terreno el receptor del transmisor para poder controlar exitosamente el controlador vex y este a su vez los motores; La finalidad de su creación como proyecto piloto fue la practica reconocimiento y manejo de los elementos dotados al grupo y para ya así recibir satisfactoria y cómodamente la inducción, el día 16 de marzo correspondiente al proceso de programacion del controlador vex y el transmisor para lograr así el buen desarrollo creativo de nuestro proyecto definitivo
Asiéndose el primer llamado a la preocupación del equipo puesto que en esta etapa se nos complico el uso de nuestro transmisor sin saber si fue por falta de información el el como del manejo de este o sencilla mente la avería de nuestro transmisor siendo una situación problematica par nuestro futuro en el control de nuestro robot esperando así que con la inducción del día de mañana sea posible la solución a una correcta programacon y manejo de nuestro transmisor u/o su cambio inmediato estando así en la espectativa para el día de mañana
domingo, 14 de marzo de 2010
Elementos dados por el SENA "VEX"

Siendo presentados uno al otro los integrantes del grupo y dándonos a conocer por primera vez durante todo el proceso, Fue clave la presentación del instructor el cual sera el encargado de acompañarnos en el día a día y quedando conformado nuestro grupo de la siguiente manera
El instructor encargado
I.N.G Sandro Enrique Martinez Carrillo
Y los aprendices
Luis Gabriel Niviayo Avila
Sebastian Granados Bernal
Carlos Arturo Villalobos Izquierdo
 Y de esta manera dando paso a nuestra primera actividad en grupo, se decidió en grupo la creación de todo el inventario detallado para saber con que se cuenta y que haría falta o los elementos en avería puesto que esto seria importantísimo en el excelente desarrollo de nuestro proyecto
Y de esta manera dando paso a nuestra primera actividad en grupo, se decidió en grupo la creación de todo el inventario detallado para saber con que se cuenta y que haría falta o los elementos en avería puesto que esto seria importantísimo en el excelente desarrollo de nuestro proyecto
Suscribirse a:
Comentarios (Atom)