

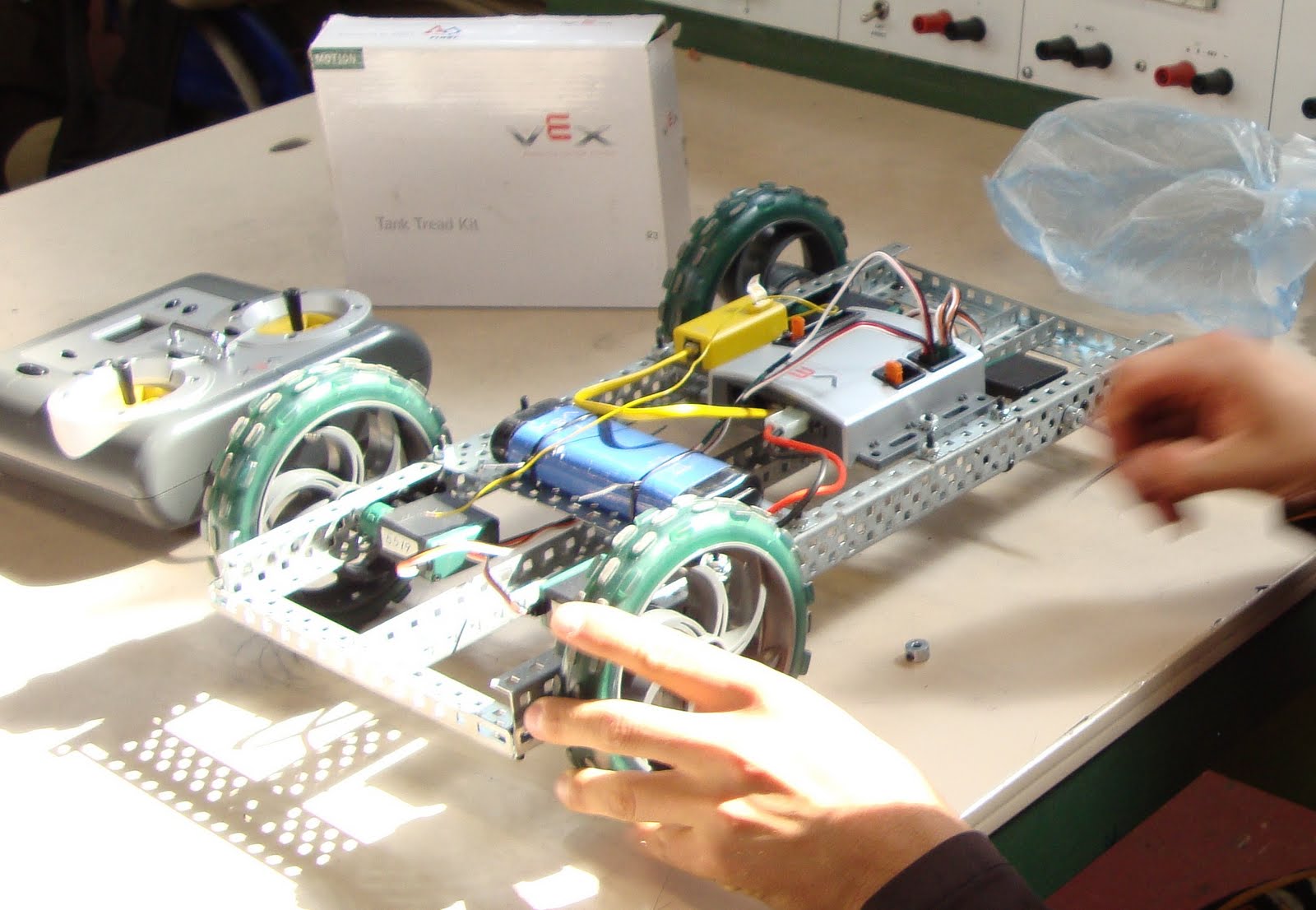
Hoy 15 de marzo se logro crear el proyecto piloto un vehículo descrito de la siguiente manera
Siendo este un modelo sencillo enfatizado solo para lograr el desplazamiento asía las cuatro coordenadas básicas derecha, izquierda, adelante y atrás por esto se dio uso a cuatro llantas labradas para todo terreno el receptor del transmisor para poder controlar exitosamente el controlador vex y este a su vez los motores; La finalidad de su creación como proyecto piloto fue la practica reconocimiento y manejo de los elementos dotados al grupo y para ya así recibir satisfactoria y cómodamente la inducción, el día 16 de marzo correspondiente al proceso de programacion del controlador vex y el transmisor para lograr así el buen desarrollo creativo de nuestro proyecto definitivo
Siendo este un modelo sencillo enfatizado solo para lograr el desplazamiento asía las cuatro coordenadas básicas derecha, izquierda, adelante y atrás por esto se dio uso a cuatro llantas labradas para todo terreno el receptor del transmisor para poder controlar exitosamente el controlador vex y este a su vez los motores; La finalidad de su creación como proyecto piloto fue la practica reconocimiento y manejo de los elementos dotados al grupo y para ya así recibir satisfactoria y cómodamente la inducción, el día 16 de marzo correspondiente al proceso de programacion del controlador vex y el transmisor para lograr así el buen desarrollo creativo de nuestro proyecto definitivo
Asiéndose el primer llamado a la preocupación del equipo puesto que en esta etapa se nos complico el uso de nuestro transmisor sin saber si fue por falta de información el el como del manejo de este o sencilla mente la avería de nuestro transmisor siendo una situación problematica par nuestro futuro en el control de nuestro robot esperando así que con la inducción del día de mañana sea posible la solución a una correcta programacon y manejo de nuestro transmisor u/o su cambio inmediato estando así en la espectativa para el día de mañana
No hay comentarios:
Publicar un comentario